系統(tǒng)架構設計師考試案例分析試題+答案!

案例場景
近年來隨著智能時代的到來,人工智能與機器人領域正經(jīng)歷技術突破與應用爆發(fā)期,機器人領域和人形機器人實現(xiàn)復雜地形行走和基礎人機協(xié)作,全球機量已突破600 萬臺/年,具身智能將推動機器人自主執(zhí)行家庭服務、災害救援等任務。
圖1給出了一個人形機器人示意圖,人形機器人本體包括感知系統(tǒng)、決策系統(tǒng)和控制系統(tǒng)三部分。

問題內(nèi)容:
[問題1](8分)
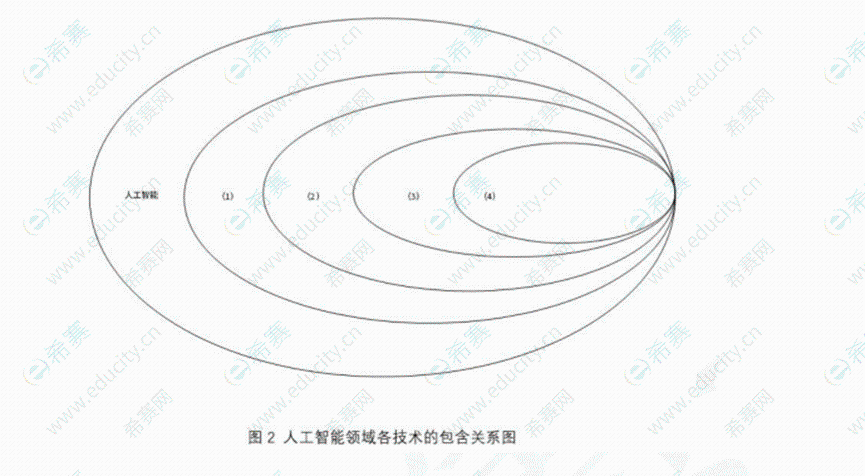
在人工智能領域里,通常分為多個技術分支,如大模型、神經(jīng)網(wǎng)絡、機器學習、深度學習等技術,他們之間是包含與被包含關系,人工智能領域各技術包含關系示意圖如圖2所示,
請根據(jù)題意完成圖2中的填空(1)、(2)、(3)、(4)。
[問題2] (7分)
根據(jù)機器人的感知系統(tǒng)、決策系統(tǒng)和控制系統(tǒng)三部分的功能,判斷下列各項屬于三部分功能中對應圖1中①到⑦的哪一項,完成表格1。
具身智能機器人的相關部件:
a)旋轉(zhuǎn)執(zhí)行器(由無框力電機、減速器、編碼器組成)
b)線性執(zhí)行器(由無框力電機、減速器、編碼器組成)
c)靈巧手(空心杯電機、減速器、編碼器組成)
d)中央計算單元
e)機器人操作系統(tǒng)(ROS)
f) 視覺傳感器(如攝像頭、微米波雷達、激光雷達)
g)聽覺傳感器(如 MEMS 麥克風)
h) 溫度和濕度視覺傳感器等
i)力傳感器(如足部的六維力傳感器)
j) 觸覺傳感器(如在靈巧手部位搭載)

[問題3](10分)
1.嵌入式實時操作系統(tǒng)調(diào)度算法包括RMS 算法、EDF 算法、LLF 算法,請用200 字以內(nèi)的文字簡單介紹這三種算法。(6分)
2.大多數(shù)嵌入式系統(tǒng)都具備實時特征,那么,這種嵌入式系統(tǒng)的典型架構可概括為兩種模式,請問是哪兩種模式?(4分)
試題答案:
[問題1)
(1)、(2)、(3)、(4)分別是機器學習、神經(jīng)網(wǎng)絡、深度學習、大模型。
[問題2]
(1) fgh
(2) j
(3)i
(4) de
(5) a
(6) b
(7)c
注意:每空1分,每空全部答對才給分
[問題3
1.
(1)單調(diào)速率調(diào)度(RMS)算法:
RMS 的基本思路是任務的優(yōu)先級與它的周期表現(xiàn)為單調(diào)函數(shù)的關系,任務的周期越短,優(yōu)先級越高;任務的周期越長,優(yōu)先級越低。
(2)最早截止時間優(yōu)先調(diào)度(EDF)算法:
根據(jù)任務的截止時間來確定其優(yōu)先級,對于時間期限最近的任務,分配最高的優(yōu)先級。
(3)最低松弛度優(yōu)先(LLF) 算法:
根據(jù)任務緊急(或松弛)的程度,來確定任務的優(yōu)先級。任務的緊急程度愈高,為該任務所賦予的優(yōu)先級就愈高,使之優(yōu)先執(zhí)行。
2.
(1)層次化模式架構
(2)遞歸模式架構
延伸閱讀

軟考備考資料免費領取
去領取
- 1
- 6
- 7







軟考通信
- 軟考高級
- 軟考中級
- 軟考初級
- 考試動態(tài)
- 在線題庫
- 在線學習
 掃描二維碼
掃描二維碼
- 如何上課
- 自學產(chǎn)品
- 直播課堂
- 視頻課程
- 企業(yè)團報
- 關于我們
- 關于希賽
- 常見問題
- 聯(lián)系希賽
- 營業(yè)執(zhí)照
-

關注希賽網(wǎng)微信
-

下載希賽網(wǎng)APP








